
Unified Neural Network-Based Shape Sensing for Continuum Robots Using Fiber Bragg Gratings
Miniaturised robotics often require shape sensing to enable accurate control in 3D space. For example, consider a robotic snake manoeuvring through the interior of a jet engine. This robotic snake needs to know the position of each point along its body at all times; otherwise, controlling the movement would be based on guesswork.
Optical sensors, such as fibre Bragg gratings (FBGs), offer a solution to this challenge. These sensors are routed along the length of the robot and reflect wavelengths that shift under bending, enabling it to encode curvature into light signals. There are two variants of FBGs: straight-core and helical-core. Straight-cored FBGs are widely used and the easiest to deploy at scale. However, they have limitations in measuring twisting motion, leading to inaccuracies in the robotic snake. This introduces positional errors that accumulate along the length of the robot and the robot tip, where accurate positioning is most crucial, experiences the largest errors.
In this study, in contrast to the traditional black box approach to neural networks, the researchers provide a ‘recipe’ for creating a neural network based on the number of positions that require correction. They propose a four-layer network with the first two layers convolutional and the final two layers dense. The framework provides the user with a strategy for selecting the number of neurons for layers 1, 2, and 4. The only layer that requires tuning is the third layer, for which the researchers conduct an ablation study showing the accuracy achievable with various neuron counts.
This approach will give future practitioners a valuable starting point instead of an empty search space. The work also present methods for optimising the physical placement of the FBG inside the robot to ensure that sensor nodes are positioned in areas of highest curvature, thereby improving the signal-to-noise ratio of the sensor. This alignment strategy can be applied beyond the scope of this study.
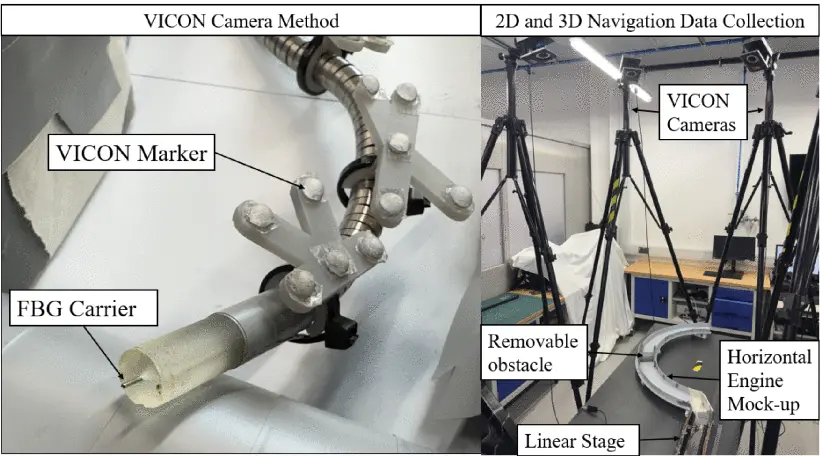
The framework was tested on two distinct snake robots designed for use in aero-engines. The first robot, FLARE, is a short, fully actuated manipulator measuring 165 mm. The second robot, COBRA, is a hybrid design measuring 1.5 m in length, incorporating a passive section that allows for increased observed twist and extended reach.
Though both robots used unique fibres, they each had their own networks trained on camera-tracked data, which enabled correction of independent positions along their bodies. For FLARE, the error dropped from 13.6 mm to 0.95 mm. For COBRA, errors reduced from nearly 39 mm to just 2 mm in 2D navigation and 1.78 mm in 3D navigation.
The model operates at over 100 Hz with a memory footprint of 0.41 MB, making it suitable for embedded deployment and fast enough for real-time closed-loop control. This method interprets twisting within the robot's domain and corrects the shape, rather than redesigning the sensing hardware or relying on external cameras. The result is real-time proprioception that generalises across two different continuum robots. Future goals include simplifying and facilitating their adoption in industrial and medical environments.