
Subblescope: Novel Thin-Film Haptic Sensing Using a Single-Bubble Approach
Vision-based haptic sensors (VHS) provide sensitive touch detection for accurate object manipulation in humans and robots. These sensors use optical methods to measure kinesthetic and tactile interactions, responding to contact force, surface properties, and texture. Current research often uses complex machine learning models to address the nonlinear behavior of elastomer materials.
This study explores air-inflated elastomers for measuring force, focusing on bubble-elastomer interactions. It aims to characterize nonlinear behavior and improve sensor calibration for normal and shear loading in various applications through compression tests and simulations.
Bubbles are vital in mechanics, medical imaging, and soft robotics. In elastomers, ruptures detect fractures, while pressure indicates elasticity. Microbubbles improve cardiac imaging and fluid mixing. In soft robotics, air-controlled structures enable delicate tasks like grasping and locomotion.
This study addresses the limitations of current VHS sensors, which measure shape, force, torque, and temperature but lack sensitivity and bidirectional capabilities needed for tasks like organ palpation. The researchers introduce the "Subblescope" sensor, featuring a single-bubble system embedded in a flexible EcoFlex 00-31 layer. This bubble acts as an optical marker, enhancing compliance and enabling bidirectional tactile sensing. COMSOL 6.1 analyzes the bubble's shape and contact points, employing hyperelastic models to calibrate the sensor for normal and shear forces, ultimately improving tactile sensing capabilities.
Robotic fingertips lack the refined touch and sensitivity of human fingertips, especially for forces below 1N. Integrating bubbles with controlled internal pressure into flexible elastomers enhances sensitivity, allowing deformation under minimal force. However, stabilizing bubble size within the elastomer is a key challenge.
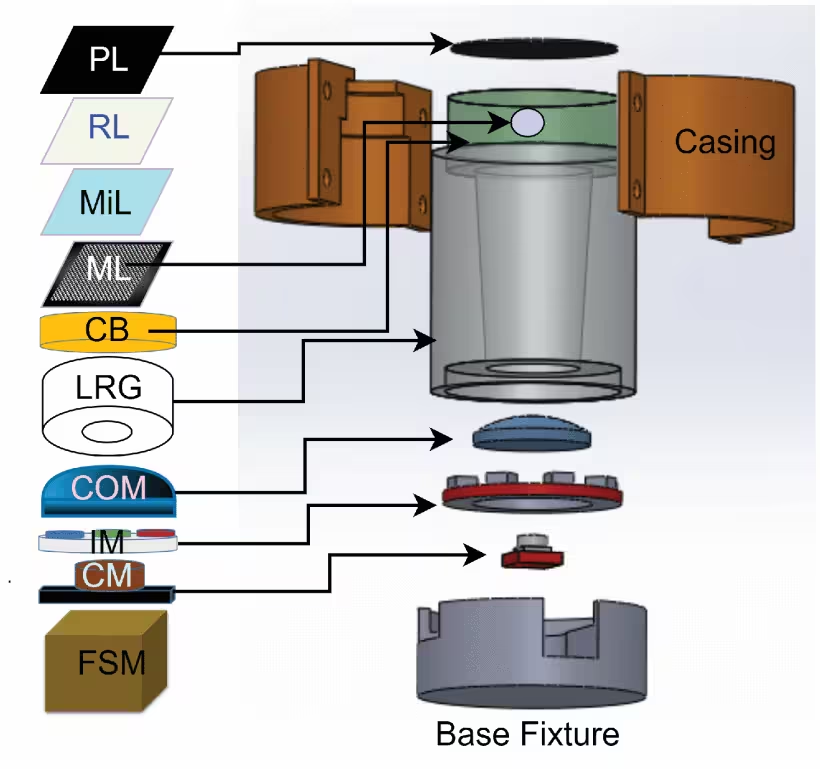
The Subblescope includes a silicone rubber protective layer, an EcoFlex 00-31 contact body, and a bubble marker. A conical acrylic structure directs light to a cylindrical substrate, encapsulated in an elastomer and secured by a PLA casing. Air injection during curing helps maintain consistent bubble size for reliable haptic sensing.
The key components feature a Raspberry Pi 4B camera, an acrylic light ray guide with LED sockets, programmable circular LED strips for illumination, and a protective elastomer layer. The camera captures the deformation of the air bubble in response to applied forces, providing precise measurements of force magnitude and direction.
A COMSOL simulation study explores how a bubble inside a flexible elastomer reacts to normal, shear, and angular forces, varying the indenter's size, shape, and position. Calibration tests assessed the sensor's accuracy and sensitivity, ensuring reliable performance in robotics.
Introducing a bubble improves the sensor's sensitivity (248.6 μN) and resolution (0.02 N) while maintaining good repeatability and reducing hysteresis. The bubble's composite structure shows linear elasticity at low forces and nonlinear behavior at higher forces.
The Subblescope offers a significant advance in haptic sensing. Its simplicity, sensitivity, and versatility could impact various industries. It can measure robotic grasping force, detect surface textures, and assess wind velocity. In biomedicine, it aids rehabilitation, estimates palpation force during ultrasound, visualizes arterial pulses, and provides haptic feedback for virtual force-based actuation. Future developments include multi-bubble sensors for spatial sensing, wireless versions for added flexibility, and machine learning integration to extract meaningful environmental data.