
Occupancy Grid Mapping for Automotive Driving Exploiting Clustered Sparsity
In today's world, there have been rapid advances in driving assistance systems and autonomous driving, driven by their potential to enhance drivers' comfort and safety. A crucial component in these systems is understanding the surroundings by detecting and mapping road obstacles, such as pedestrians, vehicles, and barriers.
Occupancy grid mapping is essential for this task. It divides the environment into cells marked as "occupied" or "free" based on sensor data, creating a binary map that aids navigation and decision-making in driving systems. This paper focuses on using LiDAR and radar sensors mounted on vehicles to generate these 2D binary environmental maps.
Various approaches are available for generating occupancy maps. Simple techniques, such as inverse sensor models, are less accurate due to sensor noise. At the same time, more advanced methods like Gaussian process occupancy mapping and Bayesian Generalized Kernel-based Mapping are computationally intensive. However, these methods often overlook contextual information such as street topology and fail to incorporate the sparse nature of occupancy maps. Additionally, the clustered sparsity in these maps, arising due to vehicles and obstacles spanning multiple co-located grid cells, is also not exploited by existing methods. The researchers present a new method to construct an occupancy map that exploits the sparse structure of the map as well as multi-cell occupancies.
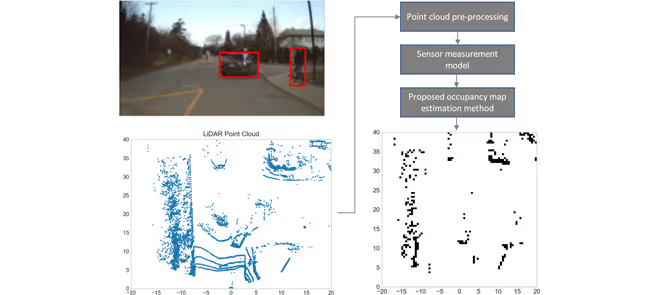
The researchers aim to construct a binary occupancy map from LiDAR and radar sensor measurements, represented as a point cloud. A point cloud is a collection of data points in space, where each point represents the location where a sensor, such as LiDAR or radar, detects an object or surface. First, we use street topology information derived from a digital map to identify the area of interest and preprocess the point cloud by removing irrelevant measurements.
The preprocessed data is then used to create a linear signal model for map reconstruction. For LiDAR, cells containing an object are marked as "occupied," while those along the sensor's path to the object are marked as "free." Due to its lower resolution, a cone-shaped beam instead of a line is used for radar. This technique results in a noisy system of linear equations where the unknown quantity to estimate is the sparse occupancy map.
Pattern-coupled sparse Bayesian learning was applied to solve the linear map of equations, accounting for both sparsity and spatial dependencies between grid cells. The final binary occupancy map is obtained by thresholding the computed estimate.
This method was evaluated using real data from the nuScenes and RADIal datasets, and the results were compared to those of existing approaches. The method was found to better suppress errors from road reflections and improve the detection of small obstacles like pedestrians and cyclists in close proximity.
The exploitation of clustered sparse structures of occupancy maps presented in the work here paves the way for further research, including developing sparsity-enhanced fusion techniques for cameras, LiDAR, and radar and exploring advanced sparsity-aware machine learning approaches for improved occupancy mapping.