
Light-Based Indoor Positioning System A Review
All positioning systems consist of two components: transmitters and a receiver. In the Global Positioning System (GPS), the satellites are the transmitter, and the target devices are the receiver. However, it is reliable only for outdoor tracking, where the target device and the transmitting satellites are in direct line-of-sight. For indoor navigation, or when tracking people and assets, where accuracy is essential, the Indoor Positioning Systems come to play.
The technologies on which the Indoor Positioning Systems are based on are: Wireless Local Area Network (WLAN), Radio Frequency Identification (RFID), Bluetooth, ultrawideband, ultrasonic, Visible LEDs, and infrared. Among it, WiFi positioning is more popular since it does not need a line-of-sight between the transmitter and the receiver. However, the internet based WiFi positioning haslimitations and is unreliable.
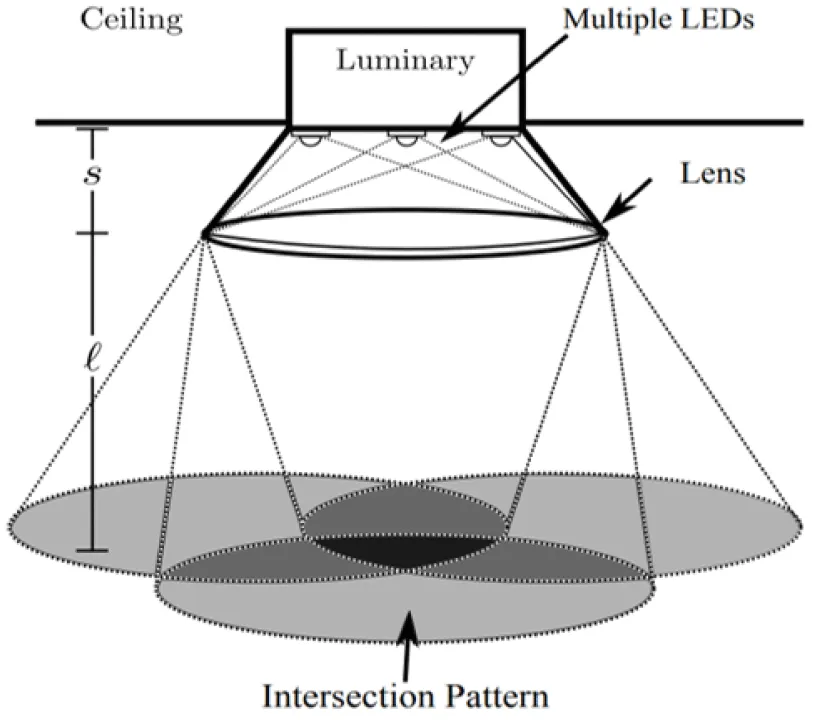
Visible Light Communication (VLC) technology emerged as a novel and more reliable alternative for WiFi-based internet access. In Light-Based Indoor Positioning (LIP) systems, LEDs are used as transmitters, and a tracking device mounted on the assets or the person being tracked acts as the receiver. The LIP systems can be classified based on the spectrum of light used, type of receiver, and the parameters that are measured at the receiver to carry out positioning.
Based on the spectrum of light, LIP is further classified as the Visible Light Positioning systems (VLP) and Infrared Light Positioning systems (IRLP). The modulation, multiplexing, and positioning algorithms are common to both VLP and IRLP. The difference is in the hardware. In VLP, visible light LEDs serve as transmitters, and a standard photodiode or a standard camera is the receivers. In IRLP, IR LEDs serve as transmitters and IR photodiode, or an IR camera is the receiver.
Multiplexing protocol is used to distinguish between the data sent from different LEDs. For this, different frequencies, time slots, or wavelengths are assigned to different LEDs. A localization algorithm is used to pinpoint the accurate position of the receiver using the decoded data. For more accuracy, different noise reduction techniques, such as Kalman filters and particle filters are employed to reduce inaccuracies. Once the position is obtained, it is made visible via a user interface.
VLP systems account for a majority of the LIP systems. The reliability of the Visible Light Positioning (VLP) is mainly due to the in-built illumination infrastructure, which minimizes the need for additional hardware. The light-based communication does not cause any Radio Frequency (RF) or electromagnetic interference and has higher accuracy. This makes it suitable for use in RF sensitive areas such as hospitals and airplanes and has great potential in commercial spaces.
The infrared light positioning (IRLP) has an advantage over VLP, where the target is not illuminated. IR based location tracking is commercially used in Virtual Reality (VR) applications. In most VR systems, the movements tracked are limited to the VR headset and controllers in the virtual environment. The higher accuracy of IR VR systems makes it more reliable for indoor positioning systems. However, unlike visible LEDs, IR light cannot provide illumination. It thus requires the installations of additional components in the infrastructure for positioning and is expensive compared to VLP, making it less viable.
The light-based positioning systems have shown immense potential for its expanding applications and accuracies in the indoor environment. It has a high potential to provide a reliable and more accurate solution to the indoor positioning systems.