
Impact of the Earth Rotation Compensation on MEMS-IMU Preintegration of Factor Graph Optimization
The integration of microelectromechanical systems (MEMS) in inertial measurement units (IMUs) has made navigation systems more energy-efficient, compact, and cost-effective. However, MEMS-IMUs face challenges such as biases and scale factors, affecting long-term navigation accuracy. Integration of MEMS-IMUs with a global navigation satellite system (GNSS)/inertial navigation system (INS) receiver enhances accuracy, as Kalman filter framework algorithms, particularly the extended Kalman filter (EKF), incorporate Earth's rotation, Coriolis acceleration, and precise corrections, thereby improving IMU performance. It was established that Earth rotation compensation is crucial for maintaining MEMS-INS accuracy.
The paper thoroughly investigates Earth rotation compensation's impact on MEMS IMU preintegration, proposing an advanced navigation system that integrates GNSS positioning with IMU preintegration through Factor Graph Optimization (FGO). This integrated approach enhances accuracy and robustness using a sliding-window optimizer.
Factor Graph Optimization (FGO) and Dynamic Networks (DN) are effective in solving non-linear optimization problems, especially in complex environments. In the past, integrating IMU into the FGO has been challenging due to the nature of acceleration measurements. Existing models often lack precision, potentially degrading INS accuracy. High-precision visual-inertial navigation systems (VINS) show improved accuracy compensating for Earth rotation, but their impact on MEMS IMUs is unproven. Long-term navigation without additional observations is crucial for accurate assessment. IMU motion integration's reliance on initial states poses challenges for seamless integration into an FGO framework.
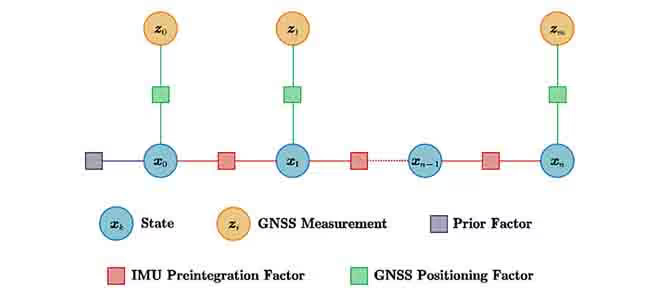
An IMU preintegration model, incorporating analytical models and a switched linear system to counter discretization effects, was proposed. The enhanced model systematically evaluates the quantitative impact of Earth rotation compensation. Within the sliding window, an IMU preintegration factor is introduced at each GNSS second, ensuring continuity during GNSS positioning outages and forming a time-continuous structure.
To streamline computational complexity, the system uses a marginalization technique. A threshold is set for the number of IMU preintegration factors, and if exceeded, the oldest IMU state is systematically removed. Additionally, the associated IMU preintegration and GNSS positioning measurements are converted into a prior factor, reducing computational complexity effectively.
The study uses a simulated GNSS outage benchmark to assess INS accuracy in integrated navigation systems, conducted in open-sky areas to minimize GNSS positioning inconsistencies. Three vehicle tests, lasting 2325, 1617, and 2333 seconds, were conducted in an open-sky area with an average vehicle speed of approximately 10 m/s. GNSS positioning is intentionally blocked for 60 seconds every 150 seconds in post-processing. Four industrial-grade MEMS-IMUs with varying precision, sampled at 200 Hz, undergo testing, and Post-Processed Kinematic solutions yield accurate GNSS results. The ground truth is obtained from a navigation-grade GNSS/INS integrated system.
The study analyzed horizontal-drift differences between IMUs to evaluate Earth rotation compensation's impact on IMU preintegration. Results showed that higher IMU performance correlates with greater horizontal-drift differences, ranging between 10-200% across different-grade MEMS-IMUs.
Rough IMU preintegration without Earth rotation compensation results in notable accuracy degradation, which is exacerbated with longer GNSS-outage durations. Compensating for Earth rotation markedly improves IMU preintegration accuracy, aligning it with precise INS mechanization levels. The study emphasizes the significant influence of Earth rotation compensation on IMU preintegration and INS mechanization accuracy, particularly for industrial-grade MEMS IMU or high-grade IMU.