
Distributed Odor Source Localization
Researchers have been trying to understand animals' olfactory senses and replicate them in mobile robots. There are advantages of combining odor sensing technology with robotics. Robots can go where living beings can't, like in hazardous waste sites or detecting chemical leaks. Using odor tracking algorithms like Spiral-surge (SS) and Swarm Intelligence (SI), multiple sensory modalities (e.g., odometry, anemometry, olfaction), and sensory fusion, they can be trained to search and identify sources of odor, making tracking and odor localization possible.
An odor plume is generated when the odor source gets dissolved in a fluid medium such as air. The stochastic nature of this fluid motion makes the plume move in discreet packets. Hence a sequential search of odor does not work. Therefore, the odor localization problem can be broken down into three subtasks: plume detection, following the plume traversal upstream to the source and source vicinity declaration. The challenge is that the odor packets become sparser and dispersed with time and distance from the source.
Earlier it was addressed using the surge-cast phenomenon observed in moths. This was called the Spiral-Surge algorithm. Initially, when an odor packet is encountered, the sensor robot samples the wind direction and surges upwind for a set distance (Plume tracking). If it encounters another packet, the robot resets step-size but not direction and surges. Else it performs another, tighter spiral search. The whole surge-spiral process is repeated with smaller and smaller gap sizes till a source is declared. The search is abandoned if the robot cannot find an odor within the set time limits of any spiral search, and a completely new odor localization process is initiated.
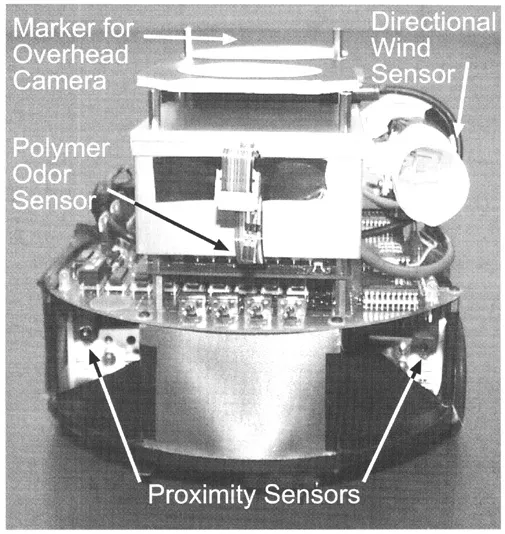
The same result may be achieved by breaking this sensor robot in a swarm of mini-robots with inter-robot-communication network capability. The algorithm used is called swarm intelligence, an artificial intelligence model based on the behavioral model of insects. Wireless transceiver, infra-red range sensors, an odor sensor and an anemometer, are the basic components for the odor localization task.
Carbon doped polymer sensors (20% carbon black and 80% poly-vinylpyrrolidone polymer dissolved in dichlormethane) is a suitable odor sensor. It detects an airborne substance through a change in the electrical resistance of the polymer film. It offers a good combination of ease of transduction, reversibility, reproducibility, ease of production, robustness across environments, miniaturization, and speed. However, the response time of the sensor and the steady-state sensitivity are paramount factors during the selection of a sensor that depends highly on the specific task.
The filtering system deployed in the hardware and the calibration of the sensors play a crucial role in setting the sensitivity of such swarm sensor robot system. To keep false positives minimum, the SNR must be kept as high as possible. These swarm robots were able to detect odor information as far as 8 m away from the source, time taken being inversely proportional to the size of the swarm. Integrating the information collected by a group of agents in an elementary manner increases the efficiency of the odor localization system performance.
Researchers need to implement robot swarms on a large scale to exploit the robust nature of odor localization systems. A handy real-world odor localization system will soon become feasible with the emergence of more advanced, mobile and discerning sensors.