
Design of Twisted String Actuated Flexure Joint for Supernumerary Robotic Arm for Bimanual Tasks
For individuals navigating the challenging path of stroke recovery, regaining functional independence is paramount. Supernumerary Robotic Limbs (SRLs) offer a transformative solution by providing an additional limb to assist with bimanual tasks and support daily activities. These wearable systems show great promise in improving the quality of life for post-stroke patients through enhanced object handling and everyday manipulation.
However, conventional SRLs often suffer from limitations in terms of size, weight, complexity, and energy efficiency. This is primarily due to the reliance on bulky motors and mechanical gear systems. These limitations directly impact wearability, portability, and the feasibility of prolonged daily use, making them less ideal for long-term motor compensation support.
This study presents a novel supernumerary robotic arm (SRA) that leverages twisted string actuated (TSA) flexure joints (FRJs) to address these constraints. The integration of FRJs with TSA forms the core of this lightweight, wearable SRL structure. This innovative approach redefines efficiency and design. The TSA mechanism is elegantly simple yet remarkably effective: it converts the rotary motion of a compact motor into powerful linear motion by twisting a pair of strings. This linear movement, in turn, directly actuates a flexible joint, effectively eliminating the need for large, traditional actuators and significantly reducing overall mechanical complexity.
The researchers developed a comprehensive design and modeling framework. This framework was then experimentally validated to assess the joint's performance. The three-degree-of-freedom (3-DoF) SRL prototype developed for this study weighs just 2.5 kg and can carry a payload of 0.15 kg. Although lightweight, this system can generate an impressive 3 Nm of joint torque while requiring a maximum motor torque input of only 32.5 mNm. This highly efficient mechanical transmission dramatically amplifies torque output, thus significantly reducing the energy footprint. The entire SRL system consumes only 40 W, making it exceptionally suitable for comfortable, prolonged daily use without constant recharging concerns.
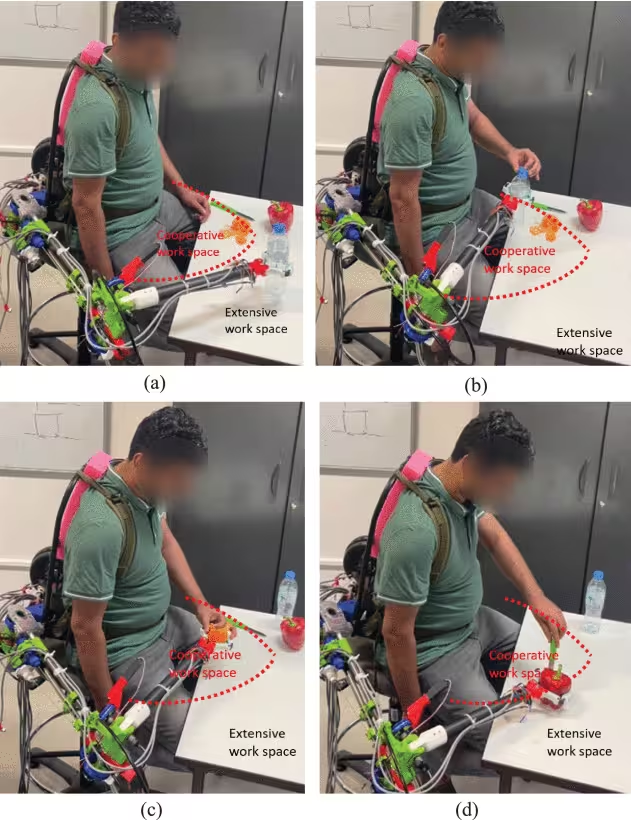
To assess the practical utility of the system, a series of bimanual task demonstrations were performed using the SRA prototype. The SRA prototype proved its capability to assist with tasks such as gripping and opening water bottles, peeling oranges, and cutting capsicums. These tests validated the arm’s ability to assist in cooperative object handling and everyday manipulation tasks. The wearable configuration and low power requirements allow the device to operate comfortably for users, particularly those requiring long-term motor compensation support.
A comparative evaluation against existing SRLs demonstrated the proposed design's superior wearability, affordability, and portability. By adopting TSA-based actuation and flexible joint design, this work significantly reduces the weight and cost associated with SRL systems without compromising on functionality or reliability.
This research contributes to the growing field of assistive wearable robotics, providing a low-cost, compact, and energy-efficient solution to support stroke survivors in regaining autonomy through bimanual task execution. The proposed system demonstrates clear potential for next-generation human-assistive technologies. Future work may focus on ergonomic optimization and developing adaptive control strategies based on real-time feedback to enhance the SRL's effectiveness in bimanual tasks.