
Design, Fabrication, and Validation of a Flexible Tactile Sensor for a Hand Prosthesis
Five-finger prosthetic hands are advanced devices designed to mimic the functionality and appearance of human hands, providing improved mobility and grip for users or functioning as industrial grippers. The development combines knowledge of human anatomy, biomechanics, and innovations in materials, sensors, and robotics.
Sensors play a crucial role in making these prosthetics more intelligent by detecting touch and pressure, allowing the hand to adjust its grip based on the object’s characteristics. Designing tactile sensors for these devices involves selecting methods to measure pressure, force, texture, and temperature accurately.
This paper comprehensively presents the development of a flexible tactile sensor using liquid metal for hand prosthetics, covering the design concept, measurement principles, fabrication process, and experimental validation.
The sensor design includes two prototypes: a fingertip tactile sensor and a palm tactile sensor. These sensors utilize a dual-layer structure made of liquid metal and silicone, which enhances their multi-axis sensing capability while maintaining flexibility. The manufacturing process involves preparing molds, formulating silicone, fabricating the sensor body, injecting Galinstan, assembling wires, and creating a custom cover to encase the palm tactile sensor.
A signal processing circuit is then implemented to address the challenges posed by the small-magnitude and noisy output signals common in resistor-based sensors. These low-level signals could be challenging to interpret without proper signal conditioning. This is where the signal processing circuit plays a crucial role. To ensure accurate and reliable readings, the system incorporates a filter to remove unwanted noise, while a programmable gain amplifier (PGA) adjusts the signal strength as needed. A 24-bit analog-to-digital converter (ADC) then converts the conditioned analog signals into digital data for further processing and analysis. This combination of components ensures that even weak and noisy sensor signals can be effectively processed and used for precise control and feedback in various applications.
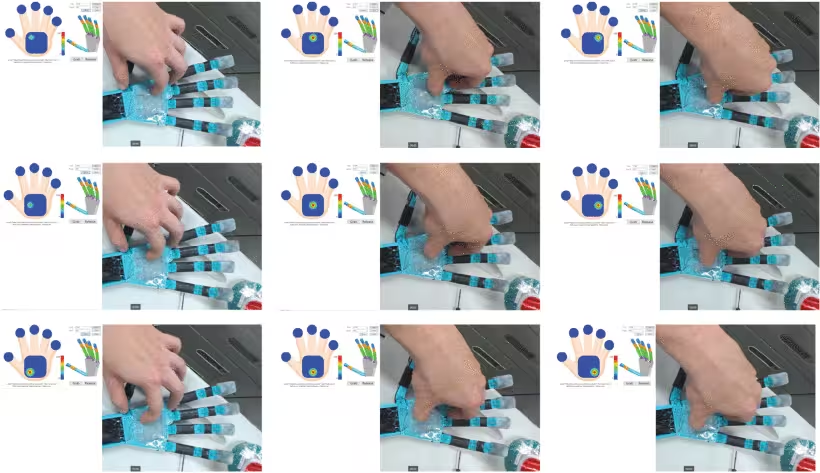
The experimental results were gathered via a computer-microcontroller communication link and displayed on a user interface (UI). The results from the sensor validation tests show that the fingertip tactile sensor can detect forces along the , , and axes, providing sensitivity levels of 1.557, 0.944, and 1.412 mV/N, respectively. Additionally, the sensor demonstrates low drifting errors (0.0265, 0.0145, and 0.0198 mV), confirming its ability to measure forces in multiple directions. These results align well with the functional requirements for use in hand prosthetic robots, proving the sensor’s effectiveness in delivering accurate, stable, and multi-axis feedback crucial for advanced prosthetic applications. The system's performance in measuring these forces showcases its potential for improving dexterity and control in robotic hands.
The study has opened an avenue to explore expanding the functionalities and improving tactile sensors to detect temperature and humidity like natural skin. Future enhancements of the hand prostheses include extending the sensors to the whole finger instead of just the fingertip and integrating joint torque sensing for improved functionality, expanding its use across diverse environmental setups and various fields.