
Design and Output Voltage Model of Folding Magnetized Electronic Skin for Intelligent Manipulator
An electronic skin (E-skin) mimics the human skin's sensitivity to touch, pressure, and surface traits, enhancing robots' environmental awareness and enabling advanced object recognition and human-computer interaction in industries like manufacturing and healthcare. An E-skin sensing unit typically incorporates capacitive, resistive, piezoelectric, and electromagnetic tactile sensing technologies.
The researchers have designed a magnetic electronic skin modeled after the multilayered structure of human skin. The unit has three key components: a magnetic film, a flexible Thermoplastic Elastomer (TPE) substrate, and a Tunnel Magnetoresistance (TMR) sensor. A static force on an electronic skin sensing unit causes the magnetic film to move linearly, increasing the magnetic field strength of the TMR element. This magnetic field change is converted into an output voltage proportional to the applied pressure, enabling precise force measurement. The folded magnetization method boosts sensitivity by generating a strong magnetic field at the crease where the TMR sensor is placed. The TMR sensor encased in silicone detects magnetic field changes from the deformation of the upper layers. The components are securely bonded with specialized adhesive.
The optimized sensing unit measures 6×6 mm². The magnetic film at the top layer, made from 3 parts NdFeB nanoparticles and 1 part silicone prepolymer, ensures flexibility and sensitivity. The TPE materials in the middle layer significantly improve electronic skins' measurement sensitivity. The bottom layer houses a TMR2503 sensor and a printed circuit encased in a 1.5 mm thick silicone elastomer. Silicone elastomer encapsulation enhances reliability by preventing desoldering from uneven stresses. The magnetic film, TPE substrate, and TMR sensor are bonded with a special adhesive.
The E-skin uses mathematical models to enhance its functionality. The TMR sensor detects magnetic field changes with varying strength by the distance between the magnetic film and the sensor. Applying force is calculated using Hooke's Law by linking output voltage to field strength and distance. A 2D model, based on Maxwell's equations and Fourier series, accounts for folding magnetization and TPE deformation. The TPE's Young's modulus, derived from Shore hardness, ensures accurate elastic deformation measurement. This approach improves precision and reduces errors, especially on dynamic or curved surfaces.
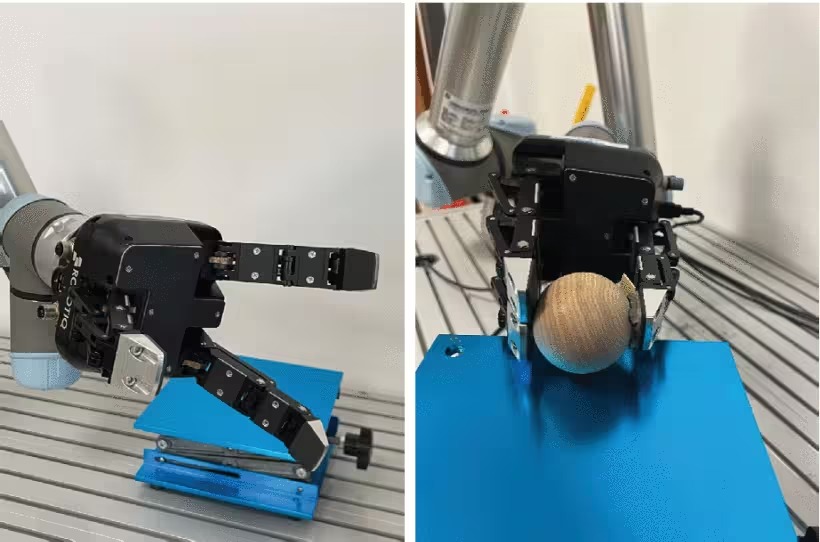
Tactile sensing-based object shape recognition effectively captures shape information by monitoring changes in sensor outputs, enabling intelligent manipulators to grasp information more precisely. Experiments were conducted to assess various algorithms based on accuracy, prediction speed, and training time. With the best overall performance, the Bayesian algorithm was selected to train the shape recognition model. The model successfully classified six shapes, with a 95.79% recognition rate.
Experimental evaluation demonstrated that the designed e-skin detects normal forces in the range of 0.05–6 N, with a maximum sensitivity of 559.65 mV/N at 5–6 N and a measurement error under 3.64%. The response and recovery times are 37 ms and 38 ms, respectively. On curved surfaces, the error remains below 5.97%.
The proposed E-skin sensing unit combines innovative materials, smart design, and advanced modeling, thus enabling a wide range of applications. Its ability to detect and measure pressure accurately makes it a versatile tool for various applications in real-world scenarios.