
Design and Evaluation of a Haptic Robot-Assisted Catheter Operating System With Collision Protection function
The prevalence of Interventional Surgery, a minimally invasive procedure performed under radiological guidance, has risen over the decades. However, while patients experience minimal pain and faster recovery post-surgery, surgeons themselves suffer occupational health hazards from prolonged radiation exposure and heavy protective gear.
With the advancement of robotic technology, many Robot-assisted Tele Interventional Surgery (RATIS) systems have become available for research and commercially. The surgeon operates the master side remotely to maneuver the robotic catheter at the patient side. The robotic catheter not only minimizes the surgeon's radiation exposure; it also improves surgical precision.
RATIS systems, as they exist today, provide limited force feedback to surgeons, severely inhibiting their natural maneuvering skills for fear of intraoperative injury.
Over the years, research groups have attempted various sensor techniques to achieve high-precision haptic force feedback. Most common approaches involved placing a combination of force and optical sensors at the catheter tip to measure the contact force and direction of the catheter tip relative to the vessel. However, multiple sensors at the tip lead to increased size, which is practically undesirable.
An innovative haptic robotic catheter system provides real-time kinesthetic feedback to the surgeons. The communication between the master and slave sides is more transparent, enabling the slave catheter to imitate the master system more reliably. A proximal force-based collision detection algorithm can alert the surgeon and avoid injuries.
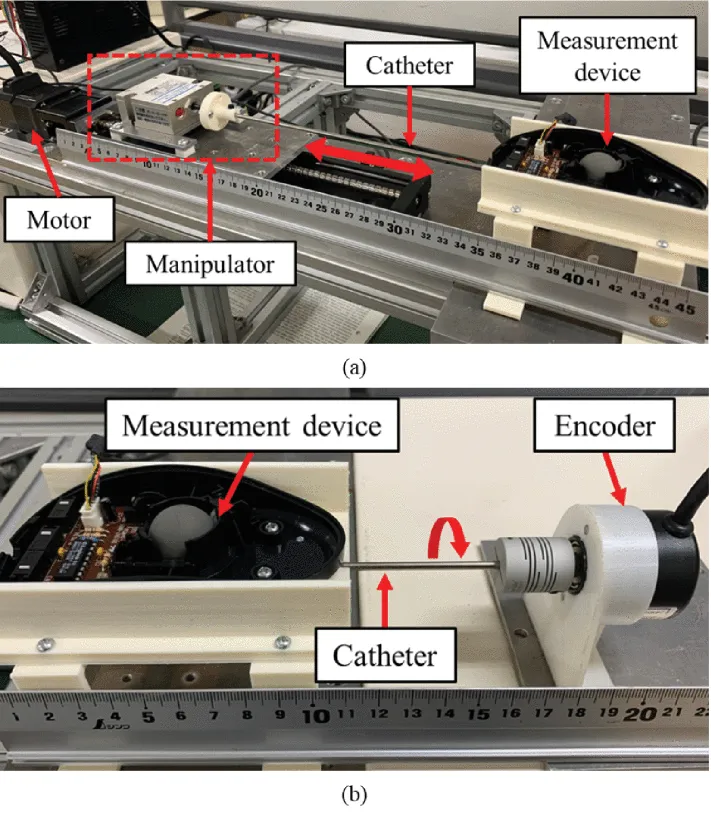
A rigid metal rod works as the control on the master side. The rod enables the natural manipulation skills of surgeons and can transmit the haptic force to the surgeon effectively. The catheter at the slave side measures the proximal force using strain gauge sensors. The collision force between the catheter and the blood vessel wall is the most influential proximal force here. A spring-based force generator successfully simulates the elastic force generated between the catheter tip and the blood vessel wall. The processing unit in this RATIS system compares the haptic and proximal forces and achieves a balance by adjusting the coil length.
During direct interventional surgeries, surgeons relied on their experience of proximal force-sensing while operating the catheter. The presented haptic force feedback system tries to replicate this human force sensitivity.
Ideally, the proximal force value should remain within a mean range, deviating significantly only in case of collision. Owing to the complexity of the human vascular system, different proximal force is generated at various stages of surgery. The collision protection algorithm used here can continuously process the force signal and establish real-time safety ranges during the surgery. If a collision occurs, the proximal force increases significantly, falling outside safety range. The algorithm amplifies the haptic force to warn the surgeon in the event of a collision.
A silicone-based endovascular evaluator (EVE) model was used to test the current haptic robot-assisted catheter operating system. The master-slave transparency evaluation of the system showed average motion accumulated error to be in the range of 4% - 6%, which is well within the limit. The system provides haptic feedback to the surgeon, reducing the surgeon's cognitive workload and the potential for fatigue-related judgment errors.
Although the proposed system has scope for improvements like; stability during prolonged procedures, and adaptability in different surgical environments, it has the potential to be used in haptic robotic surgical environments.