
A Multi-Sensor Tactile System Based on Fiber Bragg Grating Sensors for Soft Tissue Palpation
Early identification of tumors is crucial for timely treatment. Superficial tissue palpation is a clinical way of applying variable forces on the surface to detect tumors, especially in soft tissues like the breast. However, the accuracy of these soft tissue palpations depends solely on the examiner's skill.
Palpation can be invasive, as used during surgeries, or noninvasive, applied to superficial tissue to detect stiffer and potential tumors. To improve this precision, tactile probes with diverse sensors like capacitive, piezoresistive, piezoelectric, and Fiber Bragg Gratings (FBGs) have been developed.
While FBG-based sensors are effective in invasive tissue palpation and have advantages like high sensitivity, spatial resolution, and immunity to electromagnetic interference, their use in superficial tissue investigation is limited due to challenges like low spatial resolution and restricted sensor integration.
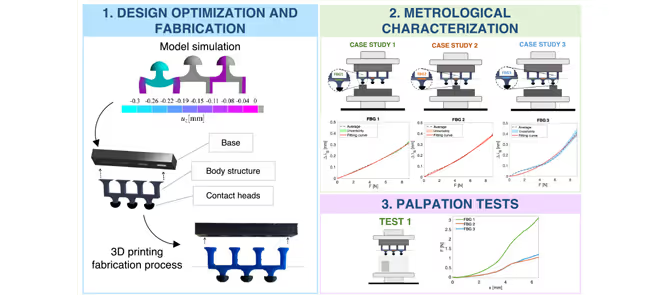
This study introduces a new 3D-printed tactile system with a three-FBG array that enhances spatial resolution and enables simultaneous measurement of multiple tissue regions. The system's design includes a stable base, contact heads for force transmission, and FBGs that detect strain changes when pressed against tissue.
Finite element modeling (FEM) was used to optimize the design, evaluating three structural configurations (two-flange, four-flange, and six-flange) for optimal strain distribution and sensor integration. The four-flange design was selected for its stable and interpretable responses, ensuring precise lesion detection. This reduces the sensing unit's size by approximately 50%, improving spatial resolution and compactness. FBG multiplexing minimizes the probe size, reducing the need for multiple optical interrogator connections.
Larger wavelength shifts indicate stiffer regions, such as tumors, with each FBG assigned a unique wavelength to prevent signal overlap. Sensor shielding further minimizes temperature effects, ensuring accurate detection of tissue stiffness.
The system was manufactured using fused deposition modeling-based 3D printing, combining a flexible TPU 95A body for deformation and a rigid polylactic acid (PLA) base for stability. Testing involved three phantoms made from ultra-stretchable silicone embedded with PLA blocks that simulated tumors at a 5 mm depth. Tumor positions varied to assess detection capabilities, with palpation tests recording the force output and controlled displacement.
Metrological tests evaluated the system’s force sensitivity and crosstalk between the FBGs, applying forces up to 9N in simulations. The recorded output generated calibration curves showing a second-order polynomial relationship between force and wavelength shift, accounting for complex force-sensor sensitivity and improved accuracy for tumor detection.
Significant crosstalk was observed, with unloaded sensors displaying output variations greater than half the amplitude of the loaded sensor, which could affect detection accuracy. To address this, the crosstalk coefficient was calculated to correct the interference. This adjustment amplified the output differences, enhancing tumor identification and reducing the impact of crosstalk from unaffected sensors, thereby improving the overall accuracy of detection.
In conclusion, this compact, multi-sensor tactile system with enhanced spatial resolution, based on FBG sensors, demonstrates the ability to accurately detect soft tissue variations for noninvasive and early breast tumor detection. Future work will focus on expanding sensor numbers, refining modeling, and incorporating AI for automated detection, with plans for clinical validation to enhance real-world application.