
3-D Magnetic Field Camera With Subsecond Temporal Resolution
From medical diagnostics and therapy to industrial automation, robotics, energy systems, and consumer electronics, magnetic fields power a wide range of modern technologies. The effectiveness of many of these applications critically depends on the accurate strength and spatial distribution of the magnetic field. As a result, accurate 3D field measurements are essential for system design, calibration, and validation.
Imagine seeing magnetic fields change in real time! To turn the imagination into a reality, the researchers have built a novel magnetic-field camera that captures 3D magnetic fields in real time. This work introduces a magnetic field camera that substantially accelerates magnetic field measurements while maintaining high accuracy, enabling scientists and engineers to observe fast magnetic events with high precision.
A magnetic field is a vector quantity, defined by both magnitude and direction at every point in space. The traditional approach to mapping these fields involves moving a single sensor sequentially to grid positions and reconstructing the field distribution from these individual measurements. Although this method is reliable, it can be time-consuming and difficult to scale up for large volumes or fine grid positions, making repeated or time-resolved measurements impractical.
The presented prototype combines two existing approaches into an innovative device. First, the sequential reading of field values at different positions in space is replaced by an array of sensors that simultaneously measure field values at carefully selected positions. Second, a physics-based reconstruction approach enables the exclusive measurements of the magnetic field within a sphere strategically positioned on its surface.
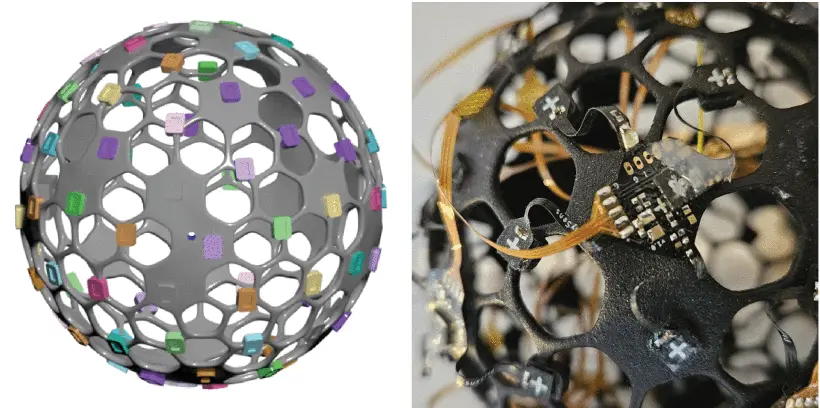
The device consists of a 3D-printed spherical holder with a 9 cm diameter, equipped with 86 three-axis Hall sensors distributed across its surface. A central microcontroller collects and transmits the data to a host computer, enabling volumetric field reconstructions at a frame rate of 10 Hz. Compared to a conventional robotic single-sensor approach, this represents a speedup of about 1800. Validation against a reference measurement shows an average deviation of about 1% in field magnitude, confirming both the calibration strategy and the robustness of the concept.
The presented approach is inherently scalable. Both the number of sensors and the size and geometry of the measurement region can be adjusted to the spatial complexity of the fields to be characterized, and to specific applications. Beyond the spherical implementation shown here, alternative geometries such as ellipsoidal regions are feasible.
The method itself is not limited to the specific sensors used in this prototype. In principle, it can similarly be applied to any sensor technology that can be distributed over the surface of a measurement volume. Consequently, the achievable field range and sensitivity are primarily determined by the characteristics of the selected sensors, making the approach adaptable to a wide variety of magnetic field strengths.
The flexibility and speed of the presented system are suitable for a wide range of industries and applications. It makes complex, dynamic magnetic field systems observable and controllable in ways that were previously inaccessible.