
Realistic LiDAR With Noise Model for Real-Time Testing of Automated Vehicles in a Virtual Environment
The Society of Automotive Engineers (SAE) has defined 6 levels of driving automation ranging from Level 0, which is no automation, rising to Levels 4 and 5, where Autonomous Control Systems (ACS) can take full control of the vehicle within its design parameters. LiDAR is one of the sensors that will likely be used to perceive the environment to enable the ACS to take control. Predictions suggest that automated vehicle systems should be driven several million miles to demonstrate they are safe. Hence, testing in virtual environments could provide a method to reduce the stipulated miles needed for automated vehicles to be declared safe on the roads.
In the article, the virtual driving environment, based on the Unreal engine, was generated in the WMG, 3xD simulator. The LiDAR model is created within this environment using Unreal Engine’s LineTrace function, which is a raycasting method. The start point was set to the position of the sensor on the ego vehicle, and a line was drawn of length equivalent to the max range of the LiDAR sensor modelled. If the line intersected any 3D object (present in the simulated environment), then properties of the object were returned, such as reflectivity and the normal vector. Combine many of these LineTrace commands emitting at different azimuth and elevation angles, and a LiDAR sensor can be built, with each LineTrace representing a LiDAR beam that produces a point and a point cloud once combined.
The article presents a noise model which adjusts the point cloud to model the effect of rain on the simulated LiDAR. This used a modelled distribution of the rain to determine the most likely number of raindrops present in the beam path. It was used to determine the Returned Intensity of Rain Drops (RIRD). Additionally, the Returned Intensity of the Object (RIO) was calculated and compared to RIRD. If RIRD > RIO and RIRD > DT, where DT was the detection threshold, a false positive was created in the point cloud where the raindrop would be. The point was removed from the point cloud if RIRD < DT. If RIRD < RIO and RIO > DT, then a partial detection was recorded.
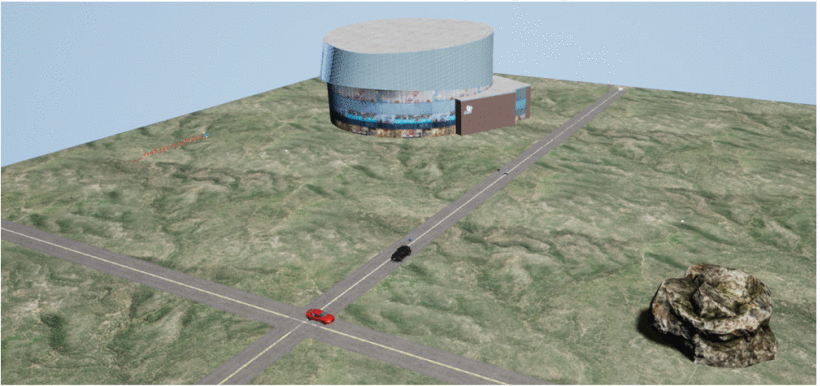
An experiment was designed with a red sedan, rock, and building to study the effect of the rain model in a dummy scene. The result showed that increased rainfall intensity caused an increase in points in the short range, a reduction in the points in the medium and far ranges, and a reduction in the total number of points detected. False positives increased with a lower DT, and false negatives decreased with a lower DT, with both increasing with a higher rainfall rate.
The LiDAR model can be parameterised to represent any 360° rotating LiDAR, and output could be adjusted to account for various rain rates. The LiDAR model with rain modelling allows realistic sensor data to be used in simulation, which is crucial for virtually testing automated vehicles’ functions.