
Soft Biomimetic Optical Tactile Sensing With the TacTip: A Review
Tactile sensors are devices that convert the mechanical strain applied to a sensing surface into an electrical signal that can be analyzed for information about physical contact. Soft tactile sensors, Soft biomimetic tactile sensors, Soft optical tactile sensors, Soft camera-based tactile sensors, and Soft biomimetic optical tactile sensors are examples of the various types of tactile sensors developed in recent years.
The information from tactile sensors is gathered using soft materials. A soft biomimetic tactile sensor is one that mimics how living organisms sense their environment. Light can be used to see the deformation in soft optical tactile sensors. Surface deformation can be imaged using a variety of soft camera-based tactile sensors, such as soft marker-based optical tactile sensors. It typically measures the shear deformation of the sensing surface.
Soft reflection-based optical tactile sensors usually measure the sensing surface's indentation. Animal touch is the basis for soft biomimetic optical tactile sensors, which combine optical imaging with biological principles underlying the sense of touch.
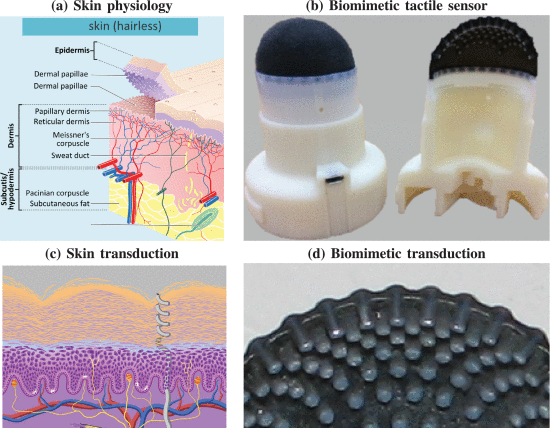
Soft biomimetic optical tactile sensors like TacTip are being developed to replicate human fingers. The thin, glabrous layers of the skin have inspired TacTip design. It consists of a tough, rubbery biomimetic epidermis and a pliable elastomer gel biomimetic dermis. Biomimetic intermediate ridges and dermal papillae are created by interdigitating these two materials.
The papillae have stiff inner nodular pins that extend under the biomimetic epidermis and into the soft gel. Deformations of the skin's surface are amplified by this design, causing the pins' visible markers to shift laterally. The markers on the pin tips serve as biomimetic analogs to the sensory mechanoreceptors and can be imaged through the dermis gel.
Hyperacuity is a crucial part of human tactile perception. The TacTip demonstrates tactile hyperacuity with a capability for spatial discrimination finer than its millimetre-scale pin spacing. A key feature of the TacTip's tactile sensing capabilities is its ability to measure contact through shear.
Markers on the nodular pin tips are displaced laterally as the skin is indented and tilted. With a biomimetic structure consisting of stiff nodular pins interdigitating with a soft elastomeric gel, the normal strain on the skin's surface is mechanically transduced into a measurable shear-strain beneath the skin. Because of its construction, the TacTip is also exceptionally responsive to the shear-strain of the skin.
Different displacement patterns of markers are generated by normal strain and shear strain on the skin. Although normal indentation can create distinctive dipole or multipole patterns, shear strain fields are more uniform after sliding or slipping. When applying the TacTip in practice, inferring contact shape information can be complicated by the presence of both normal- and shear-strain.
Once intelligent robots can interact with complicated settings, many engineering and robotics applications will be possible. There is a significant gap between what's possible in robot manipulation labs and what's known about human dexterity and touch. TacTip combines soft, biomimetic, optical, and tactile sensing as a SoftBOT sensor. A combination of soft robotics, biomimetic tactile sensing, and AI advances could help reach human-like levels of dexterity in robots.