
POT-YOLO: Real-Time Road Potholes Detection Using Edge Segmentation-Based Yolo V8 Network
Potholes pose serious risks and significant danger, leading to accidents, vehicle damage, and traffic congestion. In India, the potholes were responsible for approximately 2,600 deaths each year from 2016 to 2020 and accounted for 1% of traffic accidents in 2020. Timely detection and repair of potholes are essential for safety. However, issues like poor construction, inadequate drainage, heavy traffic, and high rainfall create challenges and complicate maintenance.
Traditional pothole detection methods included accelerometer-based systems and image processing techniques. While accelerometers can easily be implemented, they tend to be error-prone. The image-based detection faces challenges related to lighting conditions and surface textures. Recent advancements in computer vision and deep learning, particularly You Look Only Once (YOLO)-based solutions using smartphone cameras, have made real-time potholes detection more efficient, accurate, and cost-effective through neural networks.
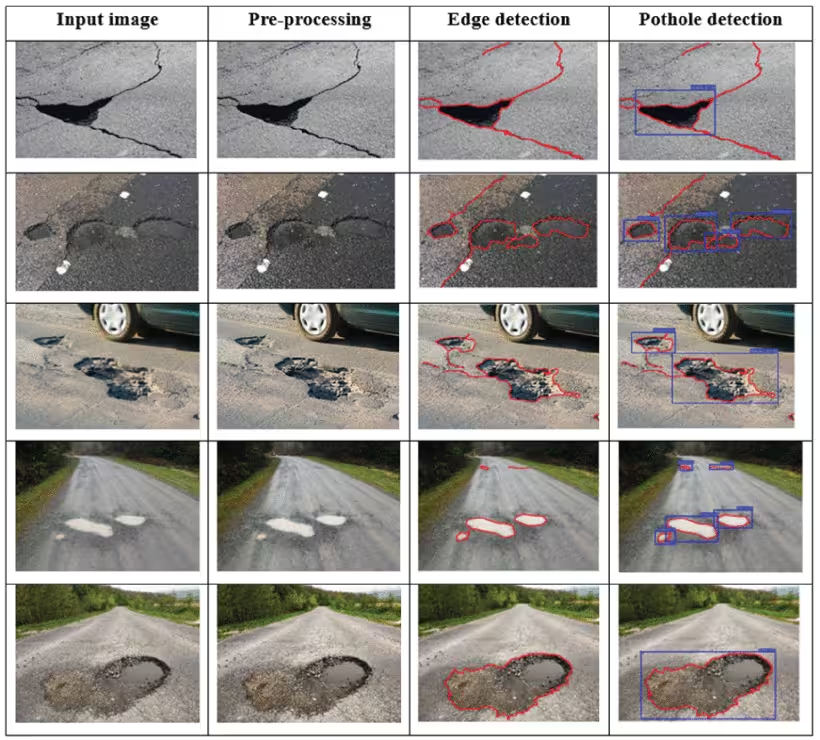
This paper presents a novel POT-YOLOv8 approach designed for detecting various types of potholes, including cracks, oil stains, patches, and pebbles. After extracting pothole videos from the dataset, the image frames are converted into contrast stretching adaptive Gaussian star filters (CAGF) to minimize distortions. POT-YOLOv8 is applied to analyze the preprocessed images to detect and identify potholes in the regions.
Adaptive Gaussian Star Filtering preprocesses pothole image frames by locally enhancing contrast within subblocks to adjust intensity ranges. Two main components of this method are extended contrast histograms and modified intensity levels. The denoising involves replacing each original intensity value using a variable transfer function tailored to image features, incorporating locally adjusted contrast stretching.
POT-YOLOv8, an enhanced version of YOLO, accurately detects pothole defects by incorporating components like MBConv and E-SPPF for efficient feature extraction and multiscale fusion. MBConv, a reversed bottleneck block, forms the foundation of EfficientNet, while E-SPPF (Edge Detector-Spatial Pyramid Pooling Fast) dynamically adjusts feature map weights based on the relevance of each region. The network, structured into backbone, neck, and head sections, improves performance through a lightweight design, adaptive pooling, and dynamic weight modulation. Its anchor-free detection and Task-Aligned Assigner improve accuracy and resilience, further refined through hyperparameter tuning for optimal pothole detection.
The researchers used a dataset from Ouma and Hahn containing potholes of various sizes and shapes under diverse conditions like noise, shadows, and pavement defects. Seventy-five test images were selected for validation, and the proposed method detects and extracts potholes within individual image tiles but not across multiple pavement images.
The performance of POT-YOLO is evaluated using accuracy, precision, recall, and F1 score. It achieves a classification accuracy of 99.10%, precision at 97.6%, recall at 93.52%, and an F1 score of 90.2%. It outperforms the ML-based DeepBus, DNN-based automatic color image analysis, and ODRNN by 12.3%, 0.97%, and 1.4% overall accuracy, respectively.
Accurate pothole detection is crucial for proactive maintenance, enabling real-time updates in smart cities, enhancing traffic management, and streamlining vehicle maintenance. The proposed POT-YOLO, a novel pothole detection algorithm, effectively identifies potholes and enables swift repairs. Future research could focus on enhancing algorithms to estimate pothole distance and severity by leveraging advanced deep-learning networks.