
On the Detection of Unauthorized Drones—Techniques and Future Perspectives: A Review
Commercial drones offer immense benefits in several services like surveillance, smart agriculture, food and parcel delivery, and infotainment. However, their presence in low-altitude airspace impacts our privacy and the security of critical public infrastructure. Extensive research has been conducted on drone detection systems for academic and commercial purposes to tackle this problem.
The paper has presented an in-depth study of the existing drone detection systems. The study provides a comparative discussion, highlighting the advantages and limitations regarding the accuracy, range, robustness, cost, and reliability of existing detection schemes. Initially, four fundamental approaches to detecting drones were more popular.
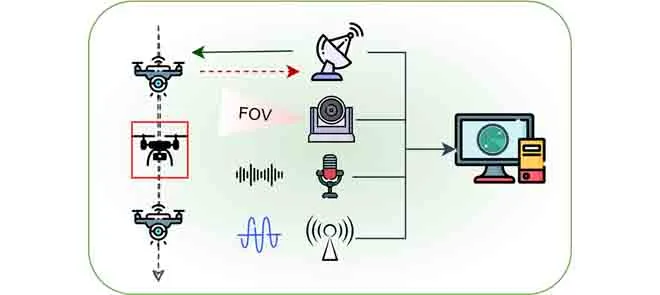
The visual detection system uses long-range surveillance cameras to detect drones within the camera's line of sight. Thermal infrared cameras improve detection in low-light and nighttime situations, while standard cameras offer better reliability during the daytime.
The acoustic detection process detects and locates drones based on the sound signatures of their engines or propellers. This method is unaffected by line-of-sight to the arriving drone or low visibility. However, the low detection ranges (~ 200 meters) may affect their performance in environments with background noise, like dense urban localities.
Radiofrequency (RF)-based detection captures the communication signal between a drone and its controller. The RF system provides a better detection range (~ 1 km) without LOS requirements. However, its performance may suffer due to radio interference by other RF devices.
Radar-based detection employs radars to process the reflected signals from the target drone’s surface using Doppler’s shift principle. Radars can accurately detect and locate aircraft, including autonomous drones and those with noise suppression, at distances over 100 km in military and civil aviation applications. However, the system frequently fails to detect small drones. Additionally, radars struggle to differentiate between drones and birds and may not detect a swarm of drones flying erratically at varying speeds.
There are certain inherent limitations to drone detection systems that are difficult to overcome. For example, acoustic detection is almost ineffective in detecting a drone utilizing noise suppression techniques. Similarly, RF detection fails to detect autonomous drones entirely. Recent progress in technology, like better sensing tools and advanced deep-learning algorithms, presents a potential solution to some of the obstacles in the field. In particular, researchers have created hybrid systems that utilize a range of sensors and employ deep-learning algorithms to detect drones.
Currently, sensor fusion typically combines visual detection systems with acoustic, RF, or radar detection. The data revealed a significant enhancement (79.54% to 95.74%) in the efficacy of an integrated drone detection system.
An alternative approach is to use long-range, non-linear detection schemes (such as acoustic, RF, or radar) for early detection alarms. The alarm would then activate a secondary sensor, a camera, which can be configured with more precise zoom and directional settings to achieve dependable and accurate detection. Sensor fusion has higher system complexity, computational complexity, and deployment costs.
Future research may integrate advanced key-encryption techniques with physical detection to develop reliable and affordable drone detection systems.