
Inkjet-Printed, Nanofiber-Based Soft Capacitive Pressure Sensors for Tactile Sensing
Soft electronics have greatly augmented the fabrication of lightweight, skin-like, flexible sensors for novel interdisciplinary areas such as human-machine interfaces, skin prosthetics, soft robotics, and wearable applications. Features like simple mechanisms, easy fabrication, high power efficiency, fast response, and high sensitivity make capacitive pressure sensors a preferred soft electronic device.
These sensors typically have plate capacitors, an elastomer-based dielectric layer sandwiched between flexible electrodes. The dielectric material and fabrication methods significantly impact pressure sensor performance, prompting extensive research in these fields. Conventional methods for soft electronics fabrication involved lithographic patterning or spin-coating. These techniques have high precision but involve complicated, expensive, and lengthy processes involving hazardous materials.
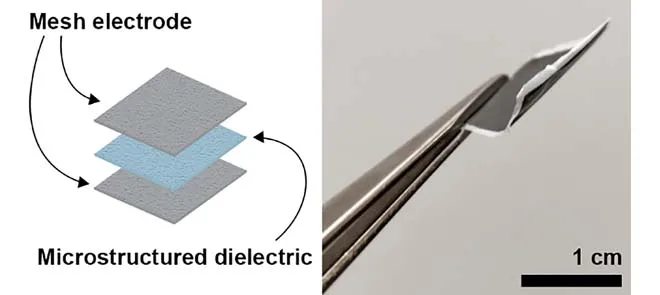
The researchers have proposed an additive, low-cost method for fabricating capacitive pressure sensors by inkjet printing. The approach involves sandwiching a mesh layer embedded in an elastomeric dielectric layer between two electrodes to form a capacitive tactile pressure sensor. The prototype was evaluated and characterized against a reference sensor fabricated using the conventional spin-coating technique.
The soft silicone elastomer polydimethylsiloxane (PDMS) was chosen as a dielectric material owing to its low cost, inertness, resilience, and biocompatibility with human tissues. Additionally, adjusting the cross-linking density of PDMS can change the softness of its viscoelasticity from a viscoelastic gel to a stiff elastomer.
The mesh layer was created by electrospinning a polyvinyl alcohol (PVA) layer onto a hydrophobic ethylene tetrafluoroethylene (ETFE) substrate. Subsequently, the electrode pattern was printed on this PVA mesh using silver nanoparticles ink. A PDMS material, Sylgard 184, was used to print and fabricate dielectric layers with pyramidal or cylindrical microstructures. The electrodes and the dielectric layers were then thermally cured at 120 °C. Extra PDMS layers were printed on the dielectric to produce a wet, glue-like layer. The electrodes were gently pressed and bonded onto both sides of the dielectric layer. After removing the excessive ink, the whole structure was again thermally cured. The process used two cross-linking densities of the PDMS to produce sensors with stiffer and softer elastomer dielectrics.
The reference sensors were fabricated by spin-coating thin foils of Sylgard 184 atop ETFE substrates to form the dielectric layer. The ink solution was then dispensed with a pipette to bond the electrodes with a glue-like layer. Again, reference sensors have stiffer and softer elastomer dielectrics produced by adjusting the cross-linking densities of the PDMS.
The evaluation experiments compared the two sensors. The dielectric layers with microstructures show better sensitivity and lower hysteresis than flat films. The prototype sensors showed high sensitivity and could accurately detect pressure spanning 1 kPa to 50 kPa, covering most activities of skin-like systems. The experiments further concluded that the prototype sensors have low hysteresis (8.5%) and could withstand long-term repeatability over 2000 cycles. The sensors could successfully detect a fingertip’s physical interaction with its surroundings, illustrating their suitability for tactile sensing.
The study demonstrated that additive and digital aspects of the inkjet-print process enable rapid prototyping and tuning of different sensor configurations. The proposed approach has the potential for mass fabrication of customized, high-sensitivity printed sensors for smart prosthetics and human-machine interfaces.