
High-Frequency Dynamic Compensation for Contact Scanning Probe Based on Dual-Parameter Feedback Optimization of Pole Configuration
Contact scanning probes are essential for surface contour detection. However, they suffer from dynamic nonlinear errors due to high-speed and high-frequency excitation, especially near the probe’s resonance frequency. These errors arise when surface features interact with scanning parameters, causing transient impacts and steady-state resonance, reducing accuracy.
Traditional methods, such as calibration and test pieces lack precision, while dynamic models offer better guidance but struggle with the complex and nonlinear nature of these errors. Existing compensation techniques mainly address transient impacts but fail to correct high-frequency resonance errors.
The proposed feedback optimization introduces a high-frequency dynamic compensation method for contact scanning that adjusts the probe’s pole configuration using dual-parameter feedback. By studying the probe’s behavior with a kinematic model, the method fine-tunes pole placement to improve compensation for wideband dynamic signals, particularly at high frequencies.
The kinematic model analyses the conversion of the probe’s force into displacement, studying its behavior, including sudden impacts and steady resonance states. This analysis helps design compensators by testing the probe’s response to wideband signals created using a sine function incorporating parameters based on surface features.
The system's response is analyzed in both time and frequency domains using Laplace transforms, with numerical simulations evaluating these dynamics to inform the design of compensators that enhance accuracy.
It then optimizes the resonance frequency and damping ratio through a state-space representation and feedback gain matrix. The matrix influences the system's poles by interacting with the eigenvectors and feedback mechanism, providing precise control over the probe's stability and dynamic behavior.
This improves compensation accuracy, especially for high-frequency signals, while emphasizing the dual-parameter impact of damping ratio and first-order natural frequency on performance.
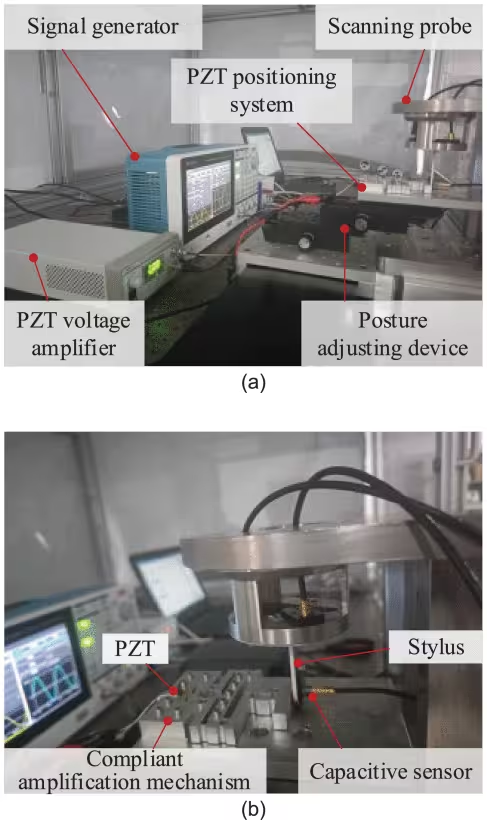
Experiments with a PZT positioning system, signal generators, and capacitive sensors confirmed these improvements, with overshoot reduced by 99.8% and adjustment time cut by 41.86%.
The method reduced steady-state errors from over 23% to below 2%, outperforming traditional methods. Simulations showed a 93.8% overshoot and large resonance errors near 160 Hz. The proposed compensator significantly improved performance, reducing steady-state errors for high-frequency signals to just 1.04%.
Tests with mixed-frequency signals also showed strong performance, reducing errors by 7.16% for wideband and 10.66% for high-frequency signals by mitigating both transient oscillations and steady-state resonance effects. By using closed-loop feedback and optimizing the compensator's pole configuration, the method greatly improves compensation accuracy for high frequencies.
This dynamic compensator design improves scanning probe accuracy by optimizing pole configuration through feedback, addressing both high-speed and high-frequency errors. Numerical simulations and experiments confirm its effectiveness in correcting transient and steady-state errors caused by resonance effects, offering a reliable solution for precise surface measurement.
The dynamic compensation approach used for contact scanning probes has promising future applications in various fields, such as precision manufacturing, nanotechnology, medical device manufacturing, robotics, and metrology. Future work will focus on improving system identification and refining the compensation method to enable more accurate and efficient dynamic compensation in high-precision applications.