
Design and Realization of Wide Field-of-View 3D MEMS LiDAR
Light detection and ranging (LiDAR) sensors have advantages like high resolution and highly accurate 3D measurements regardless of environmental conditions over other 3D sensing technologies, such as stereo cameras and radar. These sensors have become increasingly popular for various applications such as geospatial mapping, war zone surveillance, terrain survey, and monitoring. With the rise in autonomous vehicles, the LiDAR system is also becoming prevalent in automation applications.
Traditional spinning scanning motors were utilized as the primary means of range finding in early iterations of the LiDAR design architecture. However, they are heavy, energy-inefficient, and expensive, thus making them unsuitable for automatic vehicles.
Recent research has been focused on Micro-Electro-Mechanical Systems (MEMS) scanning mirrors-based LiDAR. MEMS mirror-based LiDAR scanners are significantly smaller, faster, and less expensive. However, the MEMS mirror has a slight deflection angle resulting in a LiDAR with a minuscule field of view (FOV); of less than 20 degrees.
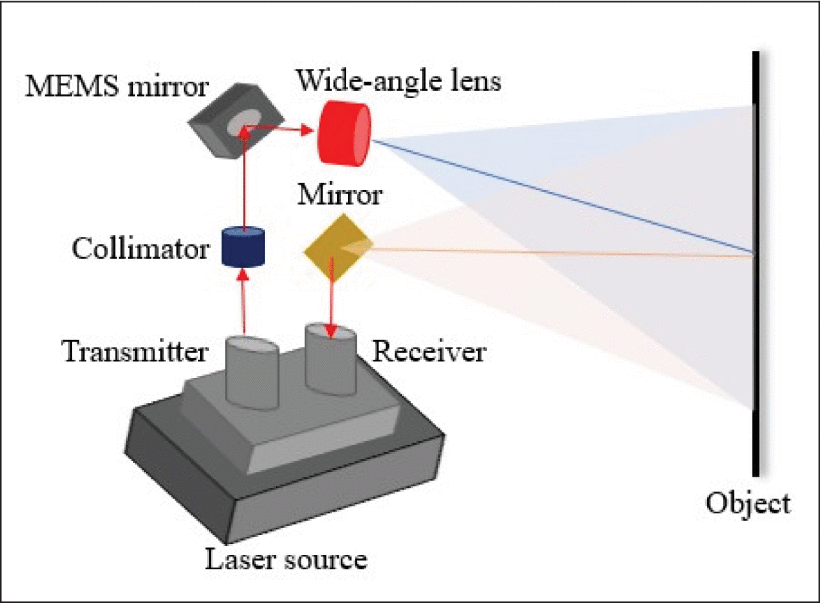
The LiDAR sensor in the proposed system uses a customized wide-angle lens set with the MEMS-LiDAR system to broaden the scanning range. The design includes a laser diode collimator, a MEMS mirror-based laser scanning system, a wide-angle scanning lens, and a photodiode.
The measurement principle of a LiDAR system is based on Time of Flight (TOF). The distance between an object and a light source is calculated using the time difference between transmitted and reflected light beams. A Garmin LiDAR lite v.3 TOF engine was chosen for the ranging unit based on its small size, fast scanning rate and coincident transmitted and reflected spots. A 1.0 x 1.2 sq. mm UM-6002G MEMS mirror was used for scanning.
Light from the laser source is collimated and modified by an off-the-shelf rangefinder before being directed to the dual-axis MEMS mirror. The deflected light from the MEMS mirror can scan a small range of a 2D scene. So, to broaden the scan range, a wide-angle scanning lens set consisting of a positive and a negative lens was placed at a distance of 1cm in front of the MEMS mirror.
The lens’s surface design is based on the free-form surface concept. The surface area was divided into smaller areas and then covered with independent aspheric surface structures. This architecture allows the system to achieve precise and extended distance scanning without curvature of field.
A single-pixel photodiode is used to capture the reflected beam from the entire range. An Arduino Uno control circuit is used to define the transmission and receiving frequency. The data is then converted into a 3D image using a customized point-cloud image processing algorithm.
Upon simulation, the proposed system successfully demonstrated an increased optical field of view of 104 degrees and a range of 250cm. This wide-angle MEMS mirror-based LiDAR system showed an image distortion of <3% in the natural light environment. The proposed system weighs less than 270g and has a 15 X 5 X 2.5 cubic cm volume.
The proposed wide-angled MEMS mirror-based LiDAR system is small, lightweight and energy-efficient with good scanning speed, large FOV and high accuracy rate. The system can be further improved by increasing the accuracy of measurement data and scanning frequency.
It shows great potential for successful integration in autonomous delivery vehicles, uncrewed robots or drones.