
Data Fusion Based on Temperature Monitoring of Aquaculture Ponds With Wireless Sensor Networks
Aquaculture ponds are one of the significant ways of cultivating aquatic animal products for food industries. The quality of water in the breeding process directly determines the yield and quality of products. Water temperature is a critical environmental factor affecting the quality of the food products. The temperature fluctuations and changes lead to several problems, which, in extreme situations, may even cause the death of aquatic animals, thus leading to financial losses.
The wireless sensor networks can realize the real-time monitoring of the quality, temperature, environment, and general condition of the water. However, the data collected by the sensors are affected by natural noise and other environmental factors, which affect the accuracy of measurements and the authenticity of the data collected. Also, the large breeding pond areas make the environment and water temperature inconsistent, thus affecting the accuracy of data and monitoring of the water temperature.
A real-time fusion strategy with high accuracy is proposed after in-depth research and exploration were carried out to design layered and clustered wireless sensor networks. It addressed the challenges of the earlier data collection methods through inefficient sensor networks, which showed low fusion accuracy and inadequate real-time temperature monitoring in aquaculture.
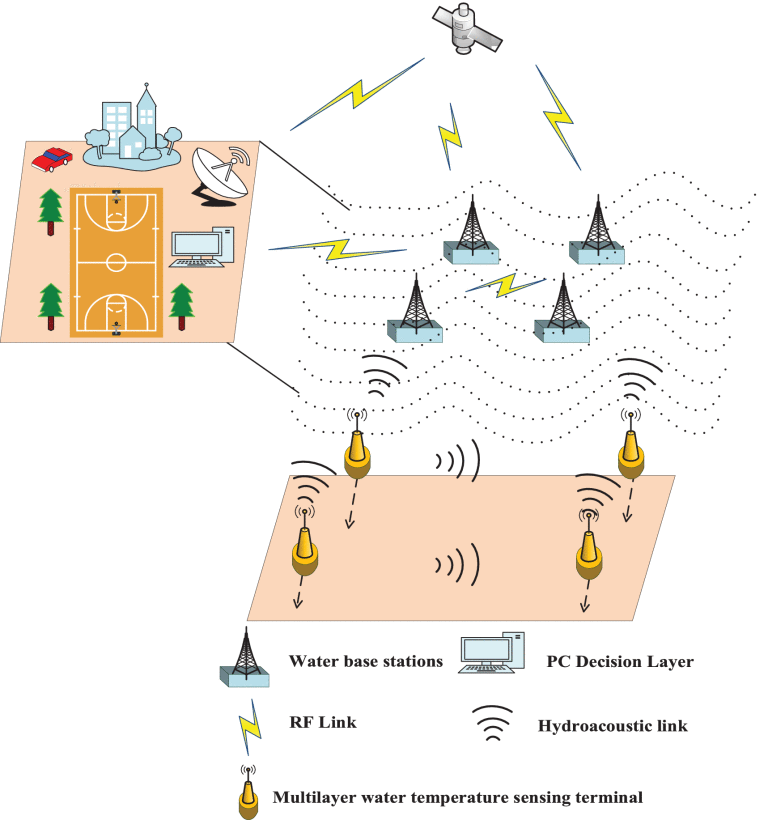
For the deployment problem of the underwater network, the basic architecture of the network is analyzed, according to which the deployment problem is divided into two levels: underwater node deployment and surface relay node deployment to realize the scientific deployment of sensor monitoring.
In the underlying data processing, the Unscented Kalman Filter (UKF) algorithm is improved by introducing a matrix decomposition idea, robust factor, and maximum posterior weighting. It solves the filtering collapse problem, effectively suppresses the influence of measurement model uncertainty and estimates, and adjusts the system noise statistics online, thus improving the filtering robustness.
The cluster head adopts the sequential analysis and fast inverse covariance intersection (SFICI-LSFE) algorithm to fuse the underlying pre-processed. The introduction of the sequential estimation idea reduces the computational complexity while reducing the computational time and effectively fuses all temperature state estimates.
The land base station is used as the global fusion center, and the improved seagull optimization algorithm (ISOA) is used to optimize the improved extreme learning machine (SELM). The ISOA algorithm introduces Levy flight to accelerate the search speed and avoid falling into local. The ISOA algorithm introduces Levy flight to speed up the search speed and avoid getting into local optimization. It also presents a cosine factor in the attack process to adapt the nonlinear search process of the seagull algorithm, and a positive cosine operator to balance the local search and global search ability of the algorithm in the iterative process of the optimal position of the seagull. SELM introduces the Sigmoid activation function to improve the computational performance of the neural network.
Through simulation experiments, the fusion strategy effectively improves the fusion accuracy, which meets the fusion requirements. With the wireless sensor networks temperature monitoring systems based on data fusion, the performance of the global temperature state fusion improved substantially.