
Concentrated Coverage Path Planning Algorithm of UAV Formation for Aerial Photography
The benefits of unmanned aerial vehicle (UAV) applications include excellent visual capabilities, autonomous takeoff and landing abilities, hovering capabilities, high maneuverability, and flexibility. Therefore, camera-equipped quadcopter UAVs are considered an ideal unmanned platform for efficient aerial photography. In aerial photography applications, the role of UAVs involves covering and scanning the work area using onboard sensors and transmitting the acquired information to specified ground stations. Hence, effective coverage path planning for UAVs is crucial for achieving successful aerial photography.
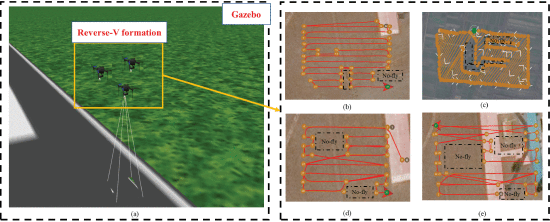
Efficient UAV photography in large, complex outdoor environments, particularly through autonomous collaborative operations of UAV clusters, is crucial. The Coverage Path Planning (CPP) problem for formations is vital in achieving autonomous collaborative UAV operations. It involves UAVs maintaining formation while covering the target area in complex environments with restricted zones, aiming for optimal paths with high coverage and low repetition rates.
The Biological Inspired Neural Network (BINN) algorithm and the Probabilistic Roadmap (PRM) algorithm remain prevalent choices for coverage path planning. Commonly used path coverage algorithms include A*, neural excitation algorithms, ant colony algorithms, genetic algorithms, and greedy algorithms.
However, these algorithms still face challenges when applied to large-scale operational areas. For instance, A* algorithms create many turning paths with high computational complexity in large-scale regions. Neural excitation algorithms show randomness and high repetition rates in complex environments. BINN algorithms have slow initial search speeds, needing many iterations to converge. These algorithms lack real-time performance and involve complex programming, making them better suited for small-scale environments.
The conventional PRM algorithm comprises two phases: a learning phase, mapping the environment by sampling points, and a query phase, finding the shortest route from start to end. However, it faces limitations such as low coverage in certain areas, increased path repetition, and longer coverage times due to reduced UAV speed during turns.
This paper proposes a concentrated coverage path planning algorithm of UAV formation for aerial photography, addressing issues in traditional Probabilistic Roadmap (PRM) algorithms. The improved PRM algorithm creates efficient coverage paths with fewer turns and shorter lengths, maximizing coverage and minimizing repetition. It starts by generating straight paths using constraints, with endpoints as sampling points. A Traveling Salesman Problem (TSP) method connects these points to form turning paths within length limits. The targeted coverage area is delineated as a closed polygon with clearly defined boundaries and designated no-fly zones.
Additionally, a formation control algorithm based on second-order consistency and the fusion of artificial potential field methods is proposed to guide the reverse V formation along the coverage path. Numerical simulations based on turns, path length, and calculation time, reflecting energy use, path efficiency, and algorithm complexity were used for validation. The efficiency of coverage paths is more accurately assessed from the perspectives of coverage rate, repetition rate, and redundancy coverage rate.
The proposed PRM algorithm surpasses traditional PRM, enhancing energy efficiency, coverage, and repetition rates while reducing randomness. It excels in energy efficiency, computational speed, and repetition rates. Overall, the strategy is ideal for concentrated UAV formation coverage in aerial photography, offering distinct advantages.