
A Self-Calibration Method for Engineering Using 3-D Laser Scanning System Based on Cube Vertices
Laser scanning technology is widely used in engineering for tasks such as environmental surveys, workpiece identification, and positioning. The newly established 3-D laser scanning system requires calibration before it can be put into operation. Traditional calibration methods require precise coordinate measurement relative to the scanning system, a process that often requires additional large measurement equipment. Many calibration methods utilize a checkerboard pattern as a calibration object; however, these methods typically calibrate the scanner's position and orientation.
Recently, some researchers have attempted to use the shape information of calibration objects as a reference for intrinsic calibration of scanning systems, achieving relatively good calibration results. Nevertheless, these methods are limited to calibrating parameters that affect the shape of the scanned object.
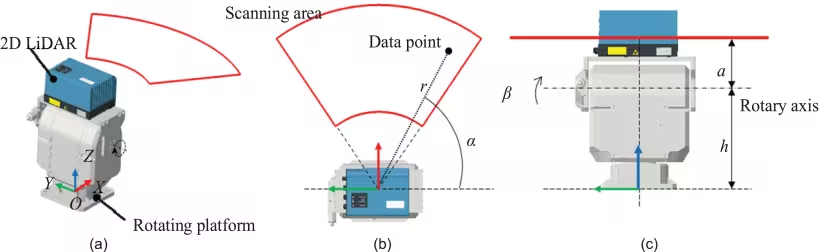
This study proposes an intrinsic self-calibration strategy for a three-dimensional laser scanning system built with a 2D LiDAR and a rotating platform. The calibration object is a cube of known dimensions. A relationship between the cube's edge length and the system parameters is established from the point cloud obtained by scanning the cube. Partial intrinsic calibration of the system is completed using the cube's edge length as a reference. These intrinsic parameters, which can be calibrated based on the shape information of the calibration object, are labeled as shaping parameters, while the remaining intrinsic parameters are summarized as non-shaping parameters.
A calibration method based on single-coordinate information is proposed for non-shaping parameters. It calibrates based on the measurement errors of the Z- coordinates or Y- coordinates of the cube's vertices. This approach compensates for the shortcomings of shape-based calibration methods, achieving comprehensive on-site calibration.
In the calibration experiments, only a single cube and some flat plates were used, with no additional measurement equipment. The calibration process is not limited to laboratory settings and can be completed even in engineering environments. It requires only two scans of the cube. By extracting six vertices from the obtained point cloud through plane fitting, the system measurement parameters can be calibrated within four iterations, completing the entire process in ten minutes.
The proposed calibration method demonstrated strong accuracy and effectiveness in both simulated and real-world scenarios. Simulated tests yielded reliable parameter estimates even under high noise and distortion. When applied to real-world data from a Faro 880 scanner, the method significantly enhanced 3D point cloud accuracy. Compared to existing methods, it exhibited superior performance and robustness. However, it is crucial to consider the method's reliance on a high-quality cube and potential limitations for specific 3D scanning systems.
The proposed method self-calibrates laser scanning systems using a cube, eliminating external equipment. It improves internal parameter calibration and reduces installation errors. The method is general, simple, and straightforward, allowing for a rapid improvement in the measurement accuracy of the scanning system, thus meeting the fast calibration needs of most engineering sites.