
A Hybrid Camera System for High-Resolutionization of Target Objects in Omnidirectional Images
Object detection, a by-product of image processing, is a technique of identifying important information from a random image. This procedure has found read-world applications in face detection, number plate detection, and people counting. Object detection is specially used for surveillance purposes for monitoring people and vehicles. The images obtained from the surveillance cameras are studied to avoid any impending dangers. The cameras used for this purpose need to capture wide-angle and high-quality images to derive meaningful conclusions.
A wide-angle view can be obtained by using a fisheye lens. Fisheye lens can typically convert a finite view to a wide panoramic or hemispherical image. A camera can be made omnidirectional by placing two such lenses on either side. But the quality of the image gets severely compromised with distance. Increasing the video resolution of these omnidirectional cameras contributes to higher computational demands, affecting system performance and implementation cost.
A pan-tilt-zoom (PTZ) camera is remotely controlled to swivel horizontally or vertically and zoom in or out to track and capture high-resolution images. Hence, the quality of the images can be taken care of by using pan-tilt-zoom cameras compatible with wide-angle cameras.
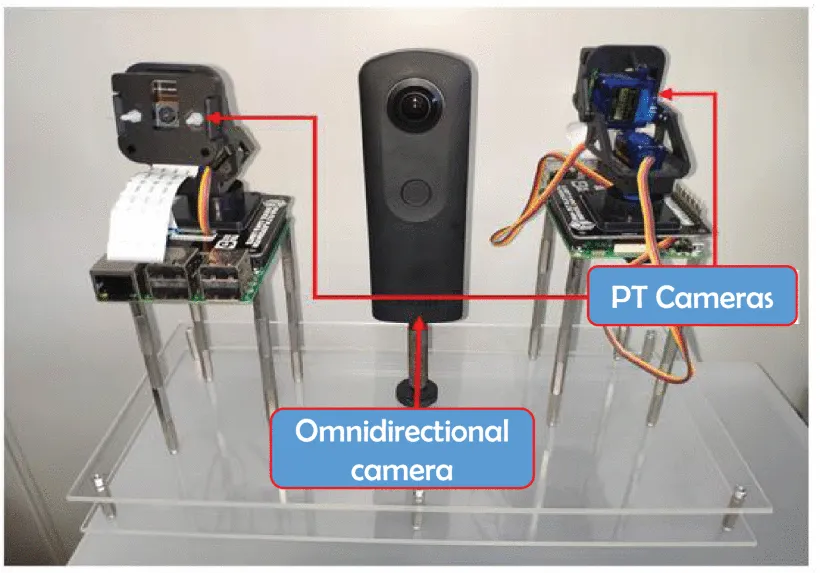
A hybrid camera system of 2 pan-tilt (PT) cameras and a monocular omnidirectional camera capturing wide angle view with high resolution is proposed to obtain the best possible result. With an omnidirectional camera in the centre, surrounded by 2 PT cameras on either side, the fabricated system is connected to a personal computer for control. First, the omnidirectional image is captured. Through image processing techniques, the target region is extracted from the image. The barycentric coordinates of the targeted image are then converted into angle information to pass to the PT cameras. PT camera then determines if the complementary image is required to be captured for better visuals. If needed, the PT camera captures the complementary image, and the final result is derived.
If there are multiple target objects in an image, then the closest one is prioritized for imaging. The priority is chosen so because distortion in the result increases with distance. In order to avoid redundant imaging of the same area, an algorithm is used to make the judgement runtime. Inaccuracy observed in capturing moving object targets is resolved by introducing optical flow, which predicts future coordinates of the target object.
Several experiments were conducted with variable parameters in terms of movement, distance and location of the camera. The resolution of pan-tilt cameras showed massively increased resolution. Hence, it was successfully demonstrated that high-resolution images could be obtained through this hybrid platform while capturing low-resolution omnidirectional images.
Camera resolution and object detection have much potential for future research. It is still problematic to capture complementary images of moving objects as target regions due to the delay in image acquisition time. Automatic object detection in captured images and zoom functionality adopted in cameras are some of the promising research prospects.