
3-D-Printing and Reliability Evaluation of an Easy-to-Fabricate Position Sensing System for Printed Functional Wearable Assistive Devices
As life expectancy rises, the need for advanced wearable medical devices has increased for the quality of life. This growing demand for assistive devices, like motorized exoskeletons and dynamic hand orthoses, has highlighted the challenge of integrating sensors in a scalable and cost-effective manner. Such devices rely on accurate feedback from actuators and sensors to improve user independence, particularly in rehabilitation for upper limb disabilities from conditions such as carpal tunnel syndrome and stroke.
However, existing solutions for sensor integration often face challenges of complexity, cost, and limited scalability. Addressing these challenges is crucial for developing efficient, affordable, and robust systems for the aging population's daily activities and enhancing experiences for those needing rehabilitation assistance.
The researchers developed a novel linear encoder using 3D-printing technology, offering a fully printed design that includes both the mechanical structure and electrical circuitry to meet the requirement. This approach significantly reduces production costs and complexity while providing a scalable solution for sensor integration in medical devices.
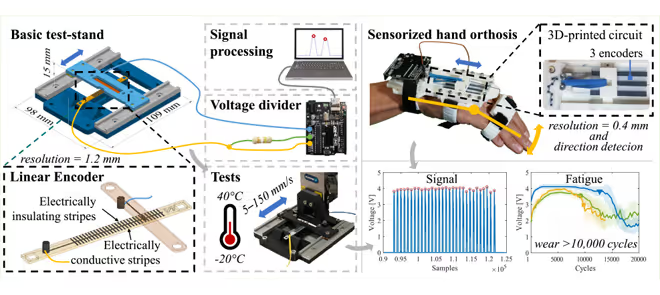
The encoder comprises two main commercially available materials: an electrically conductive material and a non-conductive material. These components are used to create alternating conductive and insulating stripes on the scale, along with a sliding sensing head that moves across the scale to detect position changes. The functioning of the encoder is based on an on/off working principle and is read by a microcontroller to determine the position and calculate the displacement.
Extensive testing was conducted to evaluate the performance of the encoder in various conditions, such as different actuation speeds, environmental temperatures, and repeated use. The encoder demonstrated stable and reliable performance over 10,000 cycles of operation with a resolution of 1.2 mm, maintaining accuracy and functionality even at a speed of 150 mm/s.
The linear encoder was integrated into a sensorized hand orthosis (sHO) to demonstrate its practical application. The sHO system was designed to detect finger flexion and movement direction, incorporating three encoders positioned with geometric shifts to improve resolution. The encoder system successfully achieved a resolution of 0.4 mm by the combined effect of the multiple encoders in the sHO setup. The sHO also includes a printed electrical circuit and an inserted microcontroller for processing the feedback data.
The use of 3D printing in developing this linear encoder offers several advantages. It simplifies the manufacturing process, lowers production costs, and enables easy scalability for different applications, as the encoder can be printed together with the whole device without a need for post-processing. The total material cost for the encoder was estimated at around 0.06 euros, making it an affordable option. Additionally, the flexibility of the design allows for adaptation to various geometries and sizes, depending on the specific requirements of the application.
This 3D-printed linear encoder significantly advances sensor integration in medical assistive devices. Its cost-effectiveness, scalability, and reliable performance make it an ideal solution for enhancing the functionality of rehabilitation devices. By providing accurate feedback on finger position and movement, the encoder can improve the independence and quality of life for users requiring assistive technology.